近日,计算机图形学领域国际顶级会议SIGGRAPH 2025(Special Interest Group for Computer GRAPHICS 2025)公布了本年度的最佳论文奖,信息学院郭诗辉教授团队的研究成果《Transformer IMU Calibrator: Dynamic On-body IMU Calibration for Inertial Motion Capture》荣获该奖项。
SIGGRAPH由美国计算机协会(ACM)于1974年创办,是全球计算机图形学与交互技术领域公认的年度顶级盛会,是中国计算机学会CCF推荐的A类国际会议,代表了该领域最高水平的学术研究、技术创新与艺术成就,是汇聚全球顶尖学者、业界领袖和艺术家的核心平台。SIGGRAPH 2025技术论文收到了超过970篇投稿,创下了该会议历年来的最高投稿纪录,本年度共评选出5篇最佳论文。
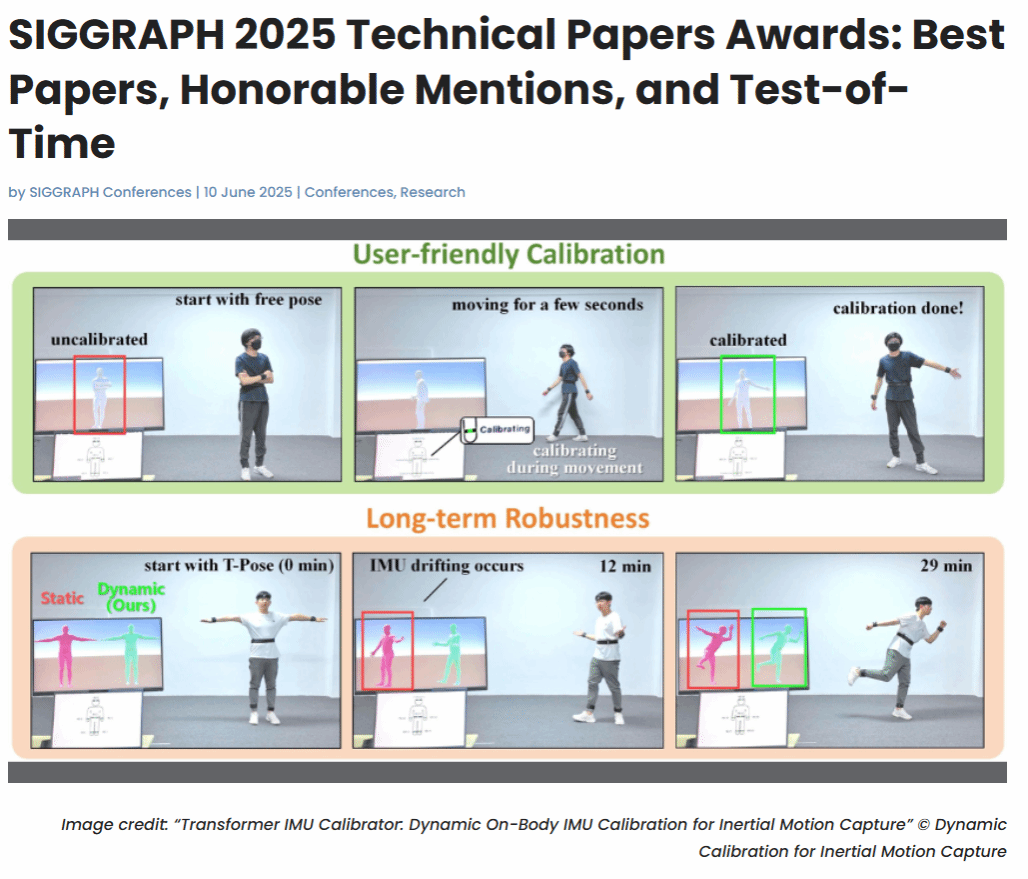
惯性动作捕捉技术凭借高便携性和低成本优势,在VR/AR、体育训练、人形机器人操控等场景中应用广泛。然而,传统IMU校准方法依赖校准参数的绝对静态假设,要求用户在使用前完成复杂的传感器坐标系校准与姿态校准,且无法应对磁场干扰、传感器偏移等动态变化,导致长期使用时测量误差显著累积,严重限制了技术的实际应用场景。
基于此,本研究提出了一种全新的传感器校准范式——动态校准(Dynamic Calibration),首次打破对绝对静态假设的依赖。本方法基于更为宽松的短时静态假设,使用基于Transformer的TIC Network从短时间窗口的IMU读数中解算校准参数,并结合基于旋转丰富度的校准触发器对校准参数进行动态更新,以适应真实场景中IMU坐标系动态漂移与穿戴位置变化导致的运动测量误差。与传统静态校准相比,动态校准使骨骼方向测量误差(OME)降低69.6%,加速度测量误差(AME)降低49.2%,同时在消费级IMU(如智能手机、智能手表)及专业设备(Xsens)上均验证了有效性,证明了该技术的普适性。
该论文第一作者是信息学院博士生左乘旭,通讯作者是郭诗辉教授,由信息学院博士生姚远、硕士生黄嘉伟、江潇、本科生曹锐(厦门大学马来西亚分校)、石祥仁(伯恩茅斯大学)、伊昕宇(清华大学)、徐枫副教授(清华大学)、秦祎芃副教授(英国卡迪夫大学)等共同完成。
郭诗辉教授领导的Human+团队近年来围绕无扰化穿戴式动作捕捉技术开展了深入研究,建立了硬件设计-算法创新-交互应用的系统工作,指导学生获得第六届中国研究生人工智能创新大赛一等奖、第二十届全国人机交互学术会议最佳技术展示奖等奖项。

